

Kontroler Integral (I)
By GEDABUZ - Kamis, 30 Agustus 2012
Laju perubahan (kecepatan) nilai output dari kontroler integral sebanding dengan nilai inputnya. Input sistem berupa variabel selisih (error) antara masukan acuan (referensi) dengan variabel termanipulasi atau output nyata dari plant.
Jadi, jika selisih acuan dengan output nyata besar maka perubahan nilai output juga besar, artinya aktuator akan “mengejar” selisih tersebut, sehingga diharapkan selisihnya semakin kecil. Karakteristik dan diagram blok kontroler integral diperlihatkan pada gambar 12.33.

Gambar 12.33 Kontroler Integral
Dibandingkan dengan kontroler proporsional, pemakaian kontroler integral relatif lebih baik dalam hal memperkecil selisih antara masukan acuan dengan output nyata. Dengan demikian, kontroler
integral akan mendorong sistem yang dikontrol (plant) untuk mencapai output yang diinginkan, sehingga selisih (error) nya semakin kecil.
Aplikasi kontroler integral ini misalnya pada pengaturan level permukaan air yang melibatkan motor sebagai komponen aktuatornya, seperti diperlihatkan pada gambar 12.34.
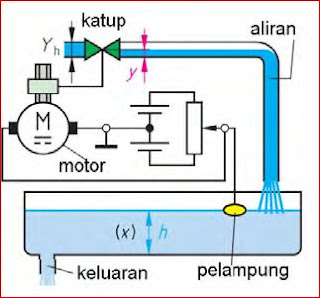
Gambar 12.34 Aplikasi kontroler integral
Dalam sistem tersebut, operasi buka tutup katup dilakukan oleh motor listrik. Torsi motor yang dihasilkan bergantung kepada nilai selisih antara acuan (yh) dengan output nyata (y) yang diukur melalui pelampung. Semakin besar selisih tersebut, yaitu apabila kecepatan berkurangnya air semakin besar (misalnya saat pemakaian air yang banyak), maka torsi motor akan semakin besar dan mempercepat buka katup, sehingga air akan semakin banyak mengalir. Dengan demikian diharapkan tangki air akan terisi air lagi secara cepat sampai ketinggian yang diinginkan.
Jadi, jika selisih acuan dengan output nyata besar maka perubahan nilai output juga besar, artinya aktuator akan “mengejar” selisih tersebut, sehingga diharapkan selisihnya semakin kecil. Karakteristik dan diagram blok kontroler integral diperlihatkan pada gambar 12.33.

Gambar 12.33 Kontroler Integral
Dibandingkan dengan kontroler proporsional, pemakaian kontroler integral relatif lebih baik dalam hal memperkecil selisih antara masukan acuan dengan output nyata. Dengan demikian, kontroler
integral akan mendorong sistem yang dikontrol (plant) untuk mencapai output yang diinginkan, sehingga selisih (error) nya semakin kecil.
Aplikasi kontroler integral ini misalnya pada pengaturan level permukaan air yang melibatkan motor sebagai komponen aktuatornya, seperti diperlihatkan pada gambar 12.34.

Gambar 12.34 Aplikasi kontroler integral
Dalam sistem tersebut, operasi buka tutup katup dilakukan oleh motor listrik. Torsi motor yang dihasilkan bergantung kepada nilai selisih antara acuan (yh) dengan output nyata (y) yang diukur melalui pelampung. Semakin besar selisih tersebut, yaitu apabila kecepatan berkurangnya air semakin besar (misalnya saat pemakaian air yang banyak), maka torsi motor akan semakin besar dan mempercepat buka katup, sehingga air akan semakin banyak mengalir. Dengan demikian diharapkan tangki air akan terisi air lagi secara cepat sampai ketinggian yang diinginkan.
Follow our blog on Twitter, become a fan on Facebook. Stay updated via RSS










0 komentar for "Kontroler Integral (I)"